


论文链接:https://proceedings.neurips.cc/paper_files/paper/2017/file/d8bf84be3800d12f74d8b05e9b89836f-Paper.pdf
摘要
PointNet++ 是2017年提出的改进型点云深度学习模型,旨在解决其前身 PointNet 无法捕捉局部几何结构的局限性。该模型通过层级特征学习,在点云中递归应用局部邻域的特征,模拟卷积神经网络(CNN)的多尺度感受野机制。其核心创新包括:
-
分层特征提取:通过采样、分组和局部特征聚合,逐步捕获从局部到全局的语义信息。
-
非均匀密度自适应:提出 MSG(多尺度分组) 和 MRG(多分辨率分组) 策略,解决点云密度不均导致的特征学习问题。
-
高效分割能力:通过特征传播层实现上采样,恢复逐点细节,支持分割任务。
实验表明,PointNet++在ModelNet40分类任务中准确率达91.9%,在分割任务中显著优于传统方法,成为后续3D检测与重建任务的基石。
主要贡献
-
层级局部特征学习
-
引入 Set Abstraction层,包含三个步骤:FPS采样(最远点采样)、球查询分组ball query(定义局部邻域)、PointNet特征提取,逐层提取更高层次的语义信息。
-
通过多层级结构模拟CNN的感受野扩展,增强模型对复杂场景的泛化能力。
-
-
非均匀密度鲁棒性设计
-
MSG:在同一邻域内使用多个半径尺度,分别提取特征后拼接,适应不同密度区域。
-
MRG:结合当前层级特征与底层特征,动态调整特征权重,减少计算量并提升稀疏区域性能。
-
-
端到端多任务支持
-
统一框架支持分类、分割和场景解析任务。分割任务中通过特征插值和跳跃连接恢复原始点云分辨率,解决下采样导致的信息丢失问题。
-
网络结构
PointNet++的架构分为特征提取层(Set Abstraction)和特征传播层(Feature Propagation)两部分,网络结构如下图所示。
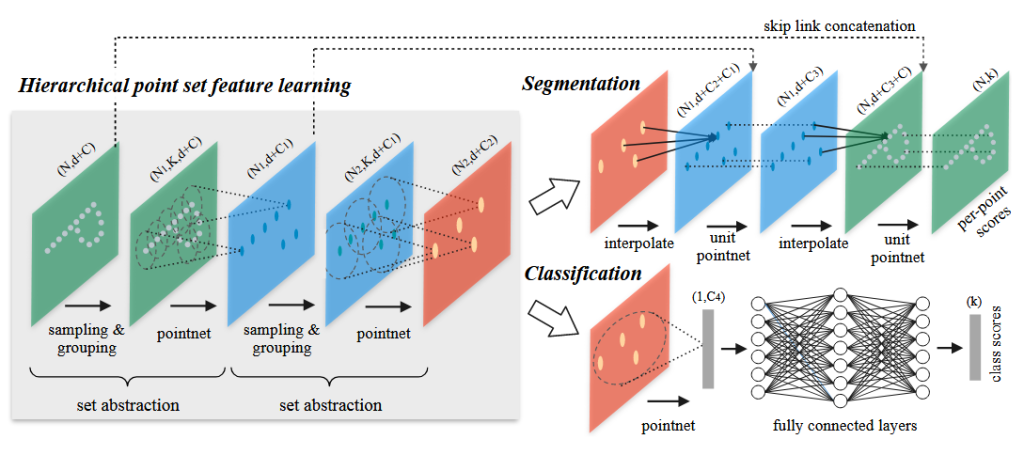
特征提取层(Set Abstraction)
1、采样层(Sampling Layer)
使用 FPS算法 选择中心点:随机选取初始点,逐步选择距离已有中心最远的点,确保覆盖整个点云。

2、分组层(Grouping Layer)
- 球查询(Ball Query):以中心点为球心,固定半径内选取邻域点,保留局部几何结构。
- 对比 KNN,球查询通过固定空间范围增强密度鲁棒性,适用于分割任务。
- 点集在不同区域具有非均匀密度,在稠密数据中学习到的特征可能无法泛化到稀疏采样区域,pointnet++提出密度自适应的Pointnet层,当输入的采样密度变化时,可以学习合并来自不同尺度区域的特征。论文中使用的是多尺度分组MSG,对不同半径的子区域进行特征提取后进行特征堆叠,特征提取过程采用PointNet。


3、PointNet层(PointNet Layer)
- 对每个邻域点云进行坐标归一化(相对中心点),通过共享权重的多层感知机(MLP)提取局部特征,最后通过最大池化生成邻域特征。
特征传播层(分割任务专用)
插值上采样:通过反距离加权插值,将低分辨率特征映射回原始点云分辨率。公式为:

实验结果

总结
优势:
-
局部特征增强:层级结构显著提升细粒度模式识别能力,如物体部件分割。
-
密度鲁棒性:MSG和MRG策略在非均匀点云(如远距离稀疏LiDAR数据)中表现优异。
-
广泛应用:为后续3D检测(如Frustum PointNet)、重建(如手物交互追踪)提供基础框架。
局限性:
-
计算开销大:MSG需多次运行PointNet,推理速度较慢。
-
参数敏感:邻域半径和采样点数需根据数据集调优,影响泛化性。


没有回复内容