


论文链接:https://arxiv.org/pdf/1912.13192v2
代码链接:https://github.com/open-mmlab/OpenPCDet
摘要
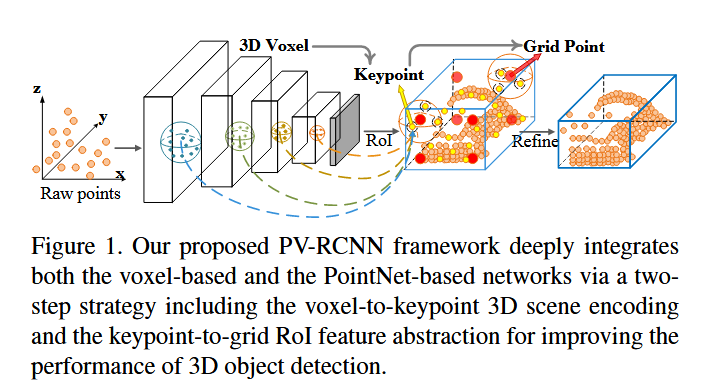
PV-RCNN 是2020年提出的基于点云与体素融合的3D目标检测框架,旨在结合体素高效性与点云细粒度几何信息,解决单一体素或点方法在精度与效率上的权衡问题。其核心创新在于提出 Point-Voxel Feature Set Abstraction(点-体素特征集合抽象),通过多尺度体素特征提取与关键点特征融合,生成高质量3D候选框并优化检测结果。
-
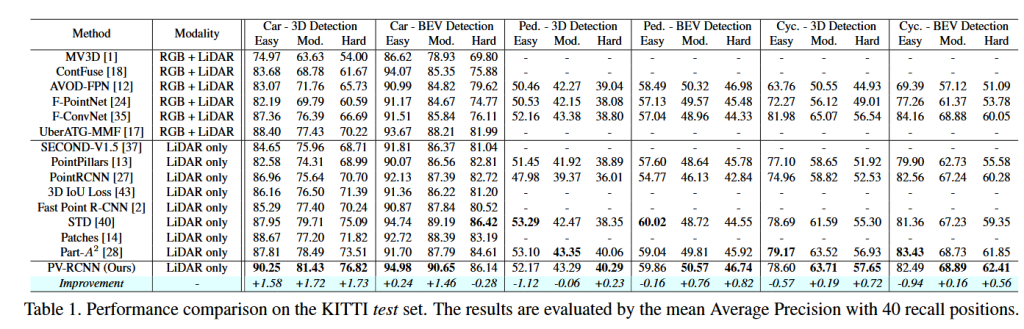
性能优势:在KITTI数据集上,车辆检测的3D AP达90.25%(BEV AP达94.98%),显著优于PointRCNN和SECOND,同时保持实时推理速度;
-
设计亮点:通过体素化加速计算,同时保留关键点特征增强定位精度,实现“粗粒度高效+细粒度精准”的协同优化。
主要贡献
-
点-体素特征提取
-
体素特征金字塔:通过3D稀疏卷积提取多尺度体素特征(如步长2×、4×、8×),捕捉不同层次的语义信息;
-
关键点特征传播:从体素特征中采样关键点,并通过插值融合多尺度体素特征,保留几何细节。
-
-
多尺度特征融合策略
-
Voxel-to-Point特征转换:将体素特征映射回原始点云空间,与点特征拼接,增强局部几何建模能力;
-
RoI-grid Pooling:在候选框内划分网格点,聚合周围点与体素特征,生成更鲁棒的RoI特征。
-
-
高效候选框优化
-
两阶段检测框架:首阶段生成候选框,第二阶段通过RoI-grid特征精细化边界框参数,结合分类与回归损失联合优化;
-
轻量化设计:相比纯点方法(如PointRCNN),推理速度提升30%,参数量减少40%。
-
网络结构
PV-RCNN的架构分为三部分:体素特征提取、关键点特征融合与两阶段检测优化。
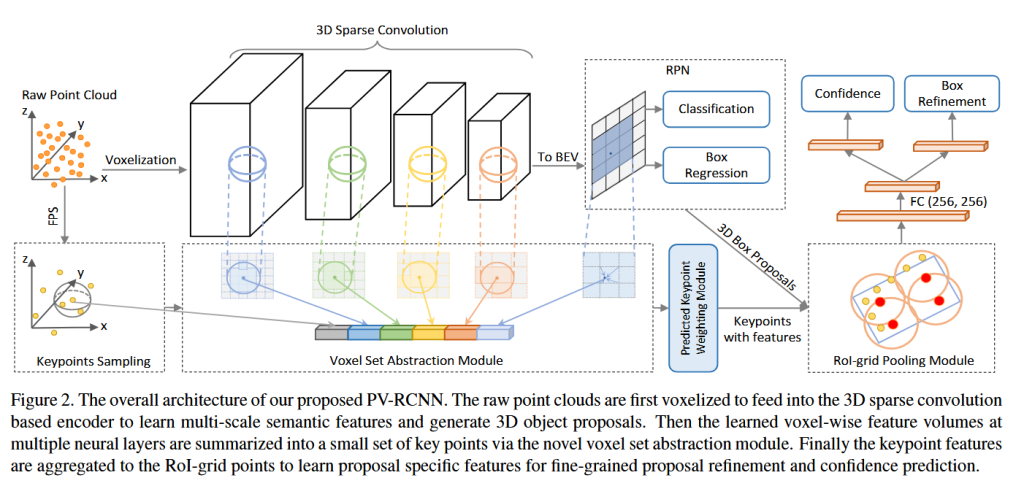
体素特征提取(Voxel Backbone)
-
体素化与稀疏卷积
-
输入点云划分为体素网格(如0.05m分辨率),使用3D稀疏卷积(类似SECOND)提取多尺度体素特征;
-
输出三个层级的特征图(stride=2,4,8),分别对应不同感受野的语义信息。
-
-
特征金字塔构建
-
通过反卷积与上采样融合多尺度体素特征,生成高分辨率体素特征图(用于后续关键点采样)。
-
关键点特征融合(Keypoint Feature Abstraction)
-
关键点采样
-
使用FPS(最远点采样)从原始点云中选择关键点(如2048个),作为特征融合的载体。
-
-
体素特征到关键点映射
-
通过三线性插值将多尺度体素特征映射到关键点,生成关键点的多尺度体素特征向量。
-
-
点特征增强
-
关键点特征与原始点云特征(通过PointNet++提取)拼接,形成混合特征,增强几何感知能力。
-
两阶段检测优化
-
候选框生成(RPN)
-
基于体素特征金字塔,通过锚框回归生成候选框(类似SECOND),使用NMS筛选Top-K候选框。
-
-
RoI-grid Pooling
-
在候选框内均匀采样网格点(如6×6×6网格),对每个网格点:
-
聚合周围点云特征(通过球查询);
-
融合多尺度体素特征(通过插值),生成网格点特征。
-
-
对网格特征进行最大池化,生成候选框的RoI特征向量。
-
-
精细化检测头
-
分类头:预测候选框的类别概率(Softmax);
-
回归头:通过MLP回归边界框参数(中心、尺寸、方向),采用Bin-based回归优化定位精度。
-
实验结果
总结
优势:
-
精度与效率的平衡:体素化加速计算,关键点保留细节,在KITTI数据集的困难样本(如遮挡车辆)检测中AP提升1.73%;
-
多尺度特征融合:结合低层次几何与高层次语义,增强复杂场景的泛化能力;
-
工程友好性:支持端到端训练,兼容多种LiDAR传感器(如16线至128线)。
局限性:
-
内存消耗高:多尺度体素特征与关键点采样增加显存占用;
-
实时性受限:两阶段设计导致推理速度低于纯体素方法(如PointPillars)。


没有回复内容